二阶系统
从汽车的悬挂系统到电路中的滤波器,二阶系统无处不在。它们是理解现实世界动态行为的基石。本文将深入探讨二阶系统的核心概念,分析其瞬态和稳态响应,帮助你建立一个清晰而完整的知识框架。
什么是二阶系统?
在控制理论和信号处理中,如果一个系统的行为可以用一个二阶常微分方程来描述,那么它就是一个二阶系统。其标准形式的传递函数为:
这个简单的公式由两个核心参数主导系统的全部特性:
自然频率 $\omega_n$ (Natural Frequency): 想象一个没有摩擦或空气阻力的秋千,它会以一个固定的频率来回摆动,这就是它的自然频率。在二阶系统中,$\omega_n$ 代表了系统在无阻尼情况下的固有振荡频率。
阻尼比 $\zeta$ (Damping Ratio): 这个无量纲参数描述了系统振荡衰减的快慢。$\zeta=0$ 意味着没有阻尼(像那个理想秋千),而$\zeta$越大,振荡消失得越快。
将$s=j\omega$代入,我们可以得到系统的频率响应表达式:
在电子学中,我们常用品质因数Q (Quality Factor)来描述谐振电路的特性,它与阻尼比的关系为 $Q=1/(2\zeta)$。高Q值意味着低阻尼和更强的谐振。
瞬态分析:系统如何响应突变?
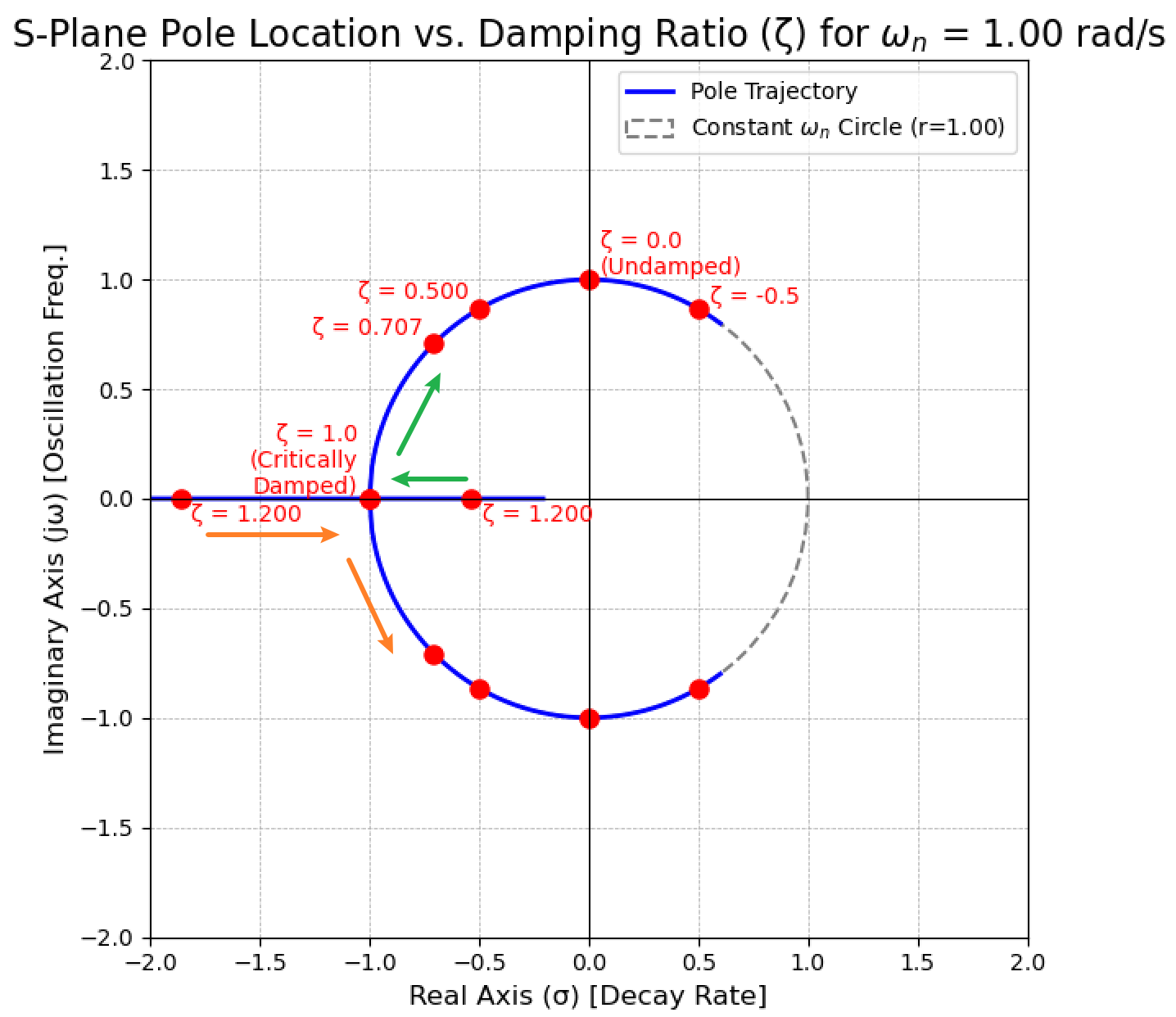
瞬态分析关注的是系统在受到一个突发输入(如阶跃信号)后的即时反应。系统的行为完全由其极点决定。通过求解特征方程 $s^2+2\zeta\omega_ns+\omega_n^2=0$,我们得到极点:
极点的位置随着阻尼比$\zeta$的变化而变化,从而根本上改变了系统的行为。其实部定义为阻尼(damping):
虚部定义为衰减后振荡频率(damped natural frequency):
根据$\zeta$的取值,系统的响应可以分为以下几种情况:
- $\zeta<-1$,极点为右半平面一对不相等实数(无震荡发散)
- $\zeta=-1$,极点为右半平面一对相等实数(发散,无震荡临界情况)
- $-1<\zeta<0$,极点为右半平面一对复数(震荡发散)
- $\zeta=0$,极点为虚轴上一对大小相等符号相反的虚数(无衰减震荡)
- $0<\zeta<1$,极点为左半平面一对复数(欠阻尼衰减)
- $\zeta=1$,极点为左半平面一对相等实数(衰减,临界阻尼)
- $\zeta>1$,极点为左半平面一对不相等实数(过阻尼衰减)
阶跃响应分析
当有输入信号为阶跃函数时,有
相应的时域表达式为
对于$\omega_n=2\pi$,不同$\zeta$时阶跃响应如下图
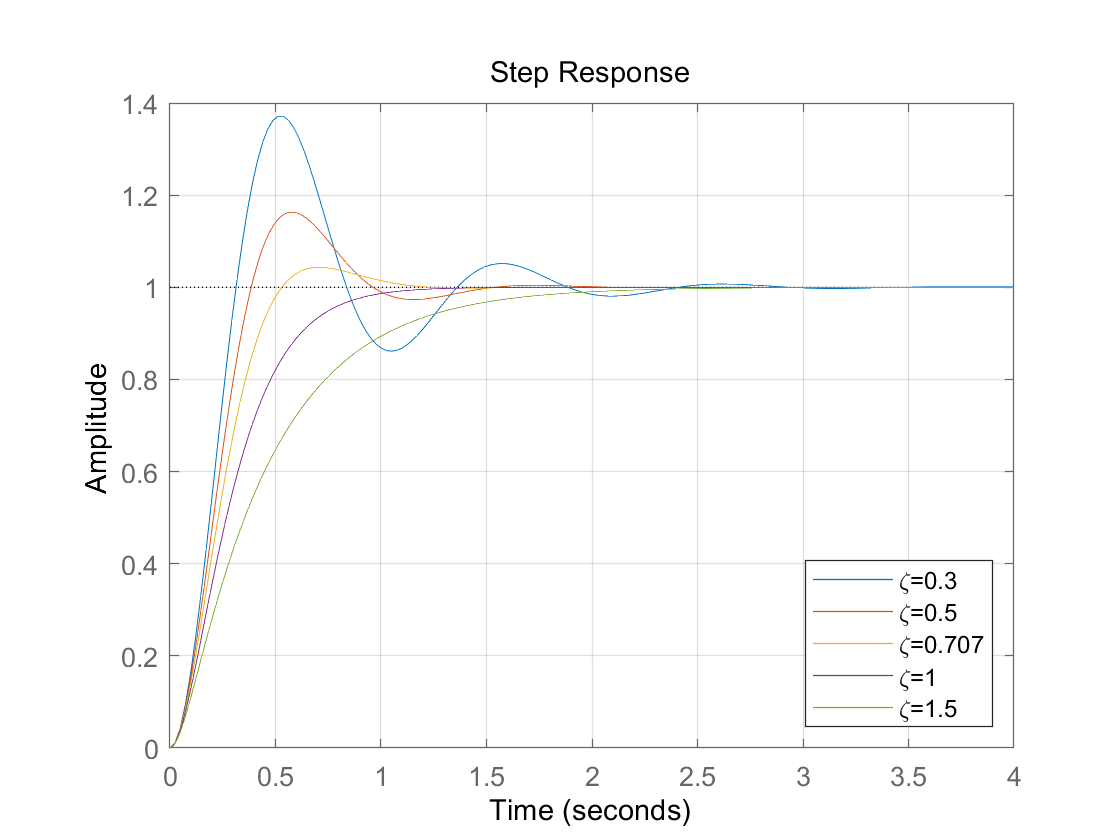
对于工程应用,我们常用以下指标来量化欠阻尼系统的性能:
- 峰值时间 ($t_p$): 响应达到第一个峰值所需的时间:$t_p = \frac{\pi}{\omega_d} = \frac{\pi}{\omega_n\sqrt{1-\zeta^2}}$
- 超调量 (%OS): 响应超过最终值的最大百分比,它只与阻尼比有关:$\%OS = e^{\frac{-\zeta\pi}{\sqrt{1-\zeta^2}}} \times 100\%$
- 调节时间 ($t_s$): 响应进入并保持在终值$\pm\delta$误差带内所需的时间:$t_s = \frac{\ln(1/\delta)}{\zeta\omega_n}$
- 对于一阶系统,$t_s = \tau\cdot\ln(1/\delta)$
稳态分析:系统如何响应不同频率?
稳态分析(或称频率响应分析)研究的是系统对不同频率正弦输入的响应。
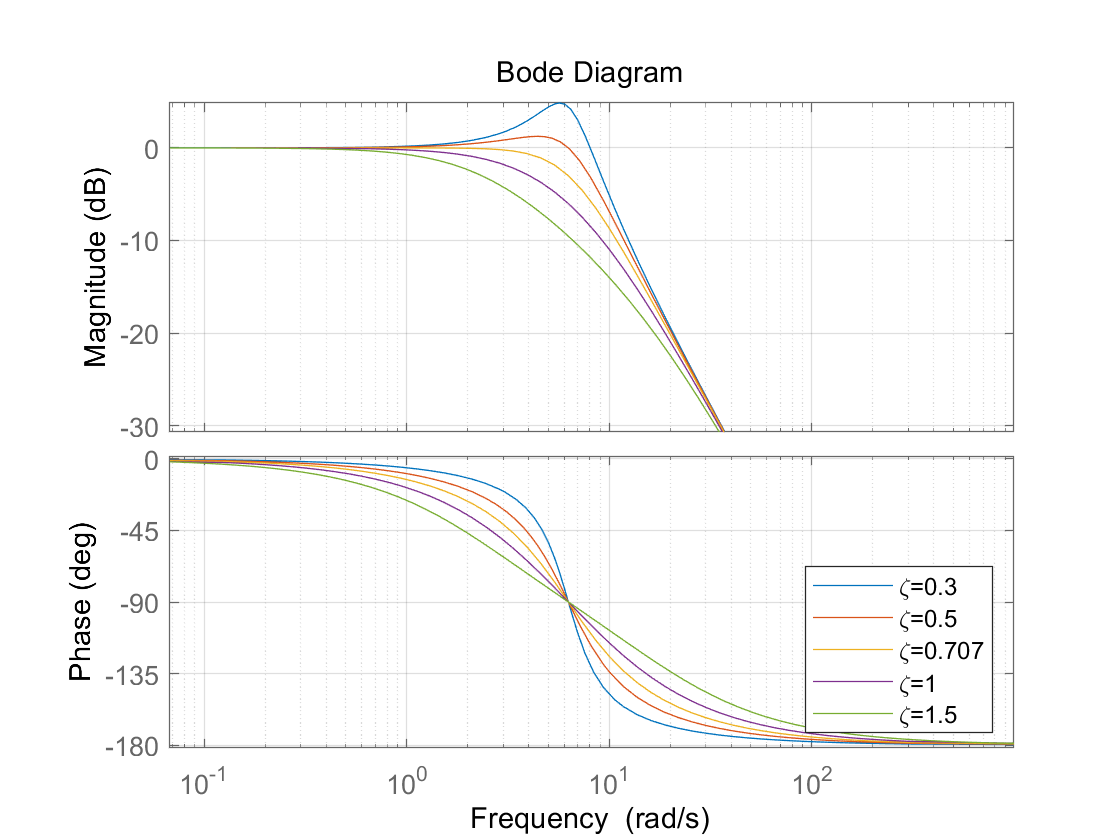
幅频响应为
相频响应为
分析三种边界情况,有
对幅频响应的分母求极值,得到谐振频率:
以及谐振时的幅值和相位
因此,阻尼因子$\zeta $决定了
- 当$\zeta>1/\sqrt{2}$时,不存在谐振频率
- 当$\zeta=1/\sqrt{2}$时,$\omega_r=0, A(\omega_r)=1, \varphi(\omega_r)=0$
- 当$0<\zeta<1/\sqrt{2}$时,存在谐振频率
- 当$\zeta=0$时,$\omega_r=\omega_n, A(\omega_r)\rightarrow\infty, \varphi(\omega_r)=-90^{\circ}$
同样的,对于$\omega_n=2\pi$,不同$\zeta$时频率响应如下图
总结
二阶系统的行为完全由其自然频率 $\omega_n$ 和阻尼比 $\zeta$ 共同决定。这两个参数定义了极点在S平面中的位置,从而决定了系统:
- 瞬态响应的形态(过阻尼、临界阻尼或欠阻尼),包括其响应速度、超调和振荡特性。
- 频率响应的形态,包括其带宽、是否存在谐振峰以及谐振的剧烈程度。
掌握了二阶系统的分析方法,就掌握了理解从简单电路到复杂机电系统动态特性的钥匙。
参考
- 控制理论学习笔记(4)——一阶系统和二阶系统.
- 孙晓波, 李双全, 王海英. 自动控制原理. 科学出版社, 2006.
- Post link: https://triblemany.github.io/archives/5777cf8/frequency-response.html
- Copyright Notice: All articles in this blog are licensed under BY-NC-SA unless stating additionally.